
Graph Neural Network Surrogates for Contact Mechanics
Question
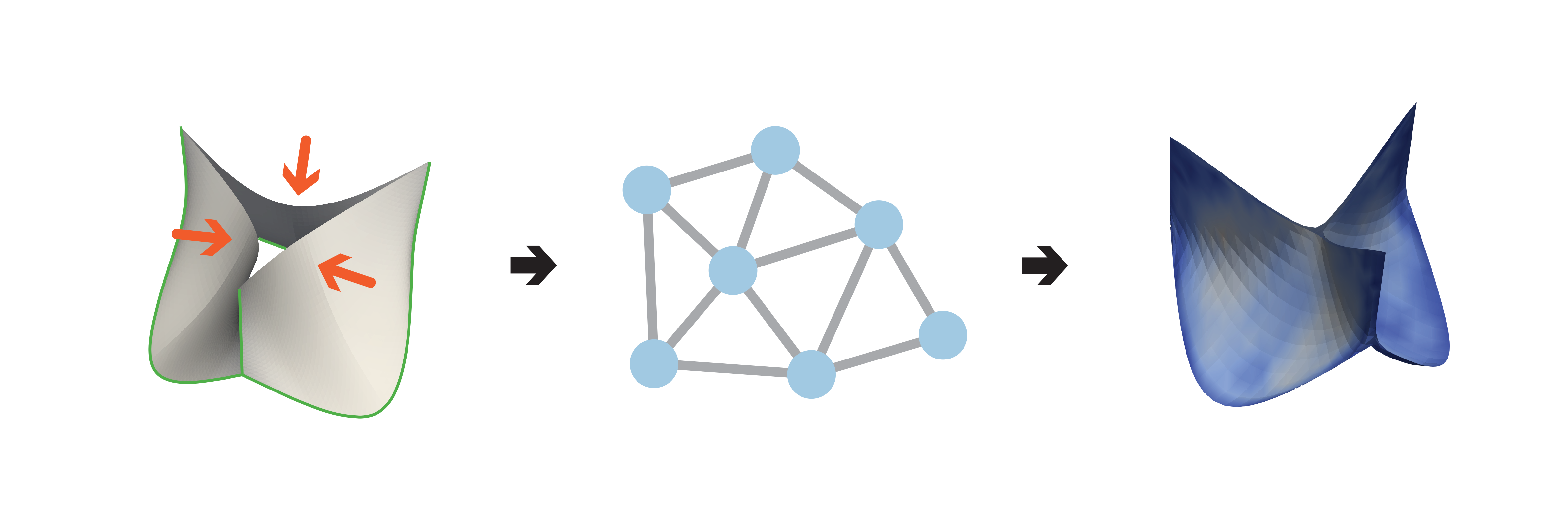
Can a graph neural network be used as a surrogate for nonlinear mechanics, especially in the presence of contact?
Summary
Surrogate models, including those based on machine learning, struggle with contact modeling. A common simplification assumes rigid body contact, thereby excluding soft material interactions. Prior works often rely on fast but insufficient necessary conditions, which can miss some contact pairs.
In our study, we present a graph neural network that utilizes continuous collision detection and, for the first time, incorporates sufficient conditions for contact detection within this framework. The robust contact detection computes a penalty that is minimized during the training.

What are our findings?
- Including contact loss regularizes training and improves generalization of contact behavior.
- Applies to complex contact: i.e., contact planes aren’t fixed, element normal angles are non-uniform, and reference configuration varies.
- Incurs significant computational cost at training time (10x) but leads to rapid inferences (1000x).
How to Cite
For more details read our paper:
Access to complete code on Soft Tissue Biomechanics Lab github here.
Access to all the dataset used in the work on the Soft Tissue Biomechancs Lab’s Texas DataVerse here.
Earlier arxiv preprint.
Citation details:
@article{dubey_graph_2026,
title = {Graph neural network surrogates for contacting deformable bodies with necessary and sufficient contact detection},
volume = {448},
issn = {0045-7825},
url = {https://doi.org/10.1016/j.cma.2025.118413},
doi = {10.1016/j.cma.2025.118413},
urldate = {2025-09-26},
journal = {Computer Methods in Applied Mechanics and Engineering},
author = {Dubey, Vijay K. and Haese, Collin E. and Gültekin, Osman and Dalton, David and Rausch, Manuel K. and Fuhg, Jan},
month = jan,
year = {2026},
keywords = {Contact mechanics, Computational mechanics, Graph neural network, Soft tissue mechanics, Surrogate model},
pages = {118413},
}